-

-

- 0755-8695 6431
联系我们




变压器油箱智能焊接视觉系统,主要针对波纹片油箱及新能源油箱提供智能化焊接技术,免编程、免示教,系统内置多种焊缝模板,轻松焊接箱体、箱体外部圆形、方形、加强筋等结构件,并拥有视觉自动识别波纹片三角区焊缝回旋焊焊接技术,解决油箱焊接难题。
1、焊接机器人;2、机器人控制柜;3、焊机;4、操控台;5、视觉系统;6、单轴变位机;7、手动工装夹具;8、波纹油箱-三角形;9、波纹油箱-四边形
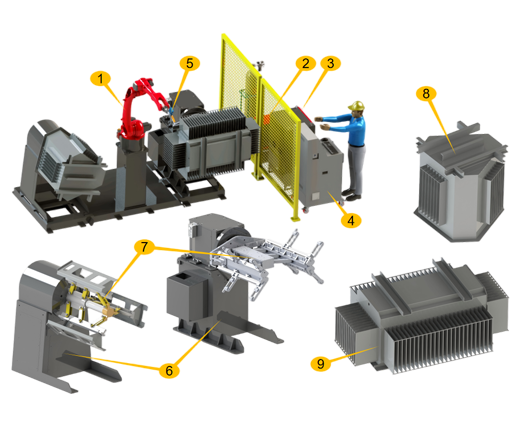
视觉寻位跟踪,实时扫描焊接,自动识别三角区焊缝并调用相应工艺执行回旋焊
视觉识别工件,引导机器人焊接,系统自动生成作业程序,自动规划焊接姿态、路径
一机双工位,支持三角、四角波纹油箱快速切换焊接,一人可管理多台设备
系统内置多种焊接工艺,应对不同工件焊接要求
简洁界面,参数化编辑,无需编程,降低使用门槛
全面兼容FANUC、新松等国内外主流焊接机器人品牌
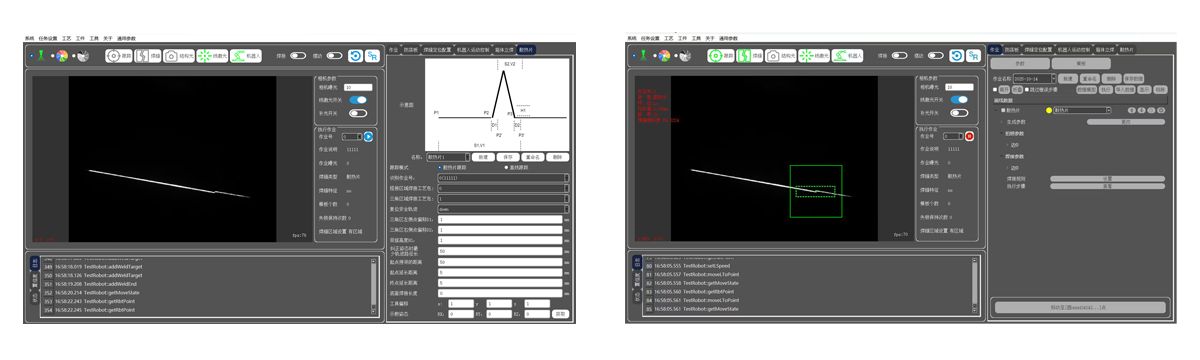
简洁UI,全中文界面,无需编程、示教,参数化编辑,普工也可快速上手。软件端输入箱体尺寸,系统自动生成焊接作业程序。
系统自动规划路径与焊枪姿态,视觉自动纠偏,超准视觉独有视觉实时扫描焊接,自动识别三角区焊缝并调用对应工艺回旋焊接技术,软件端实时焊接数据、焊接进度可查。
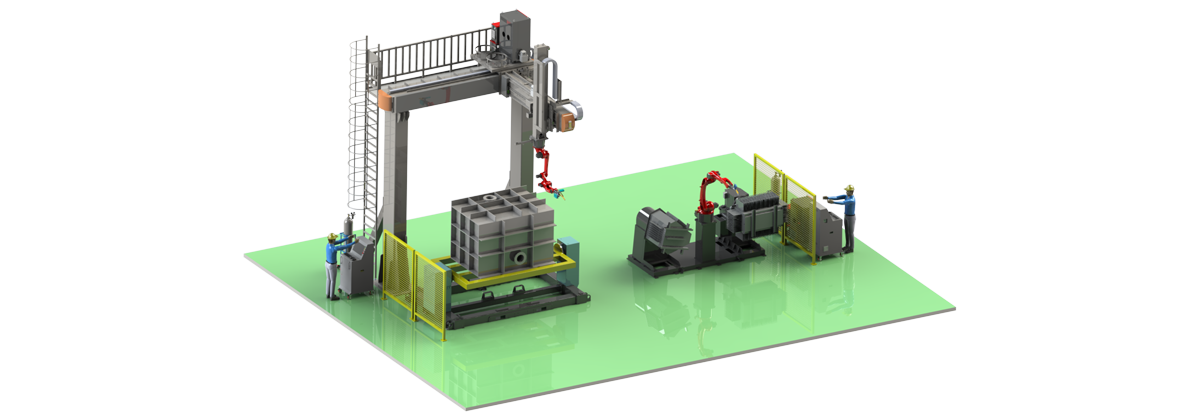
1、三轴龙门架;2、单轴翻转机;3、大油箱焊件;4、焊接机器人;5、机器人控制柜;6、焊机;7、操控台;8、视觉传感器
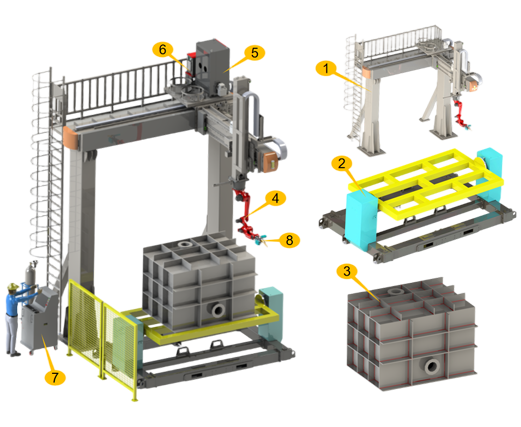
大视野传感器,2D+3D视觉精准识别工件,不惧工件偏移
视觉识别工件,无需CAD等精确图纸,轻松应对来料误差问题
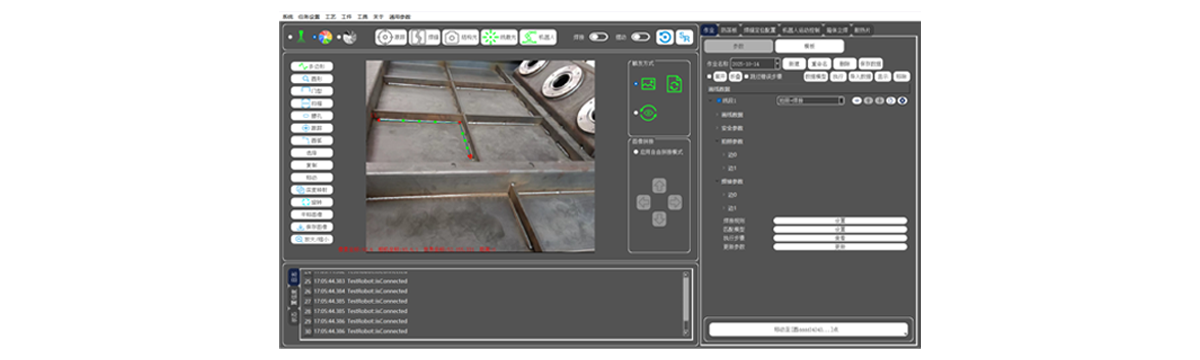
视觉识别工件,所需焊接位置画线,系统自动生成作业程序,无需人工编程示教
系统内置长直焊缝、方形、圆形结构件等多种焊缝模板,轻松画线匹配油箱多种焊缝
系统内置多种焊接工艺:多层多道、间段焊、立焊等,应对不同构件焊接要求
全面兼容FANUC、新松等国内外主流焊接机器人品牌
简洁UI,全中文界面,无需编程、示教,普工也可以快速上手。视觉快速识别工件,软件端人工自主画线决定所需焊接焊缝,系统自动生成焊接作业程序。
多层多道、摆焊、间段焊等内置焊接工艺可选,系统自动规划路径与焊枪姿态,视觉自动纠偏,软件端实时视觉识别、焊接数据、焊接进度可查。
支持箱体、箱沿和波纹片焊接,特有视觉实时识别三角区回旋焊技术

支持新能源油箱箱体、外部结构件和加强筋焊接

 扫码关注公众号
扫码关注公众号
